
 Click it and Unblock the Notifications
Click it and Unblock the Notifications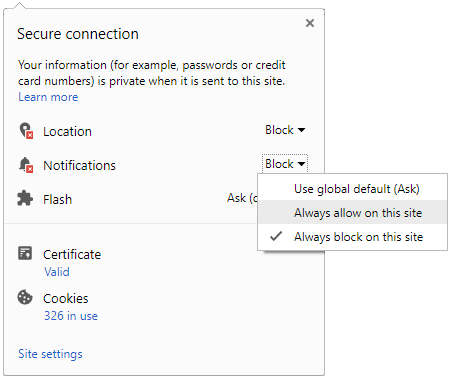

Just In



Don't Miss
-
 Kalki 2898 AD: Facts About Ashwatthama To Know Before Watching Prabhas-Amitabh Bachchan's Film
Kalki 2898 AD: Facts About Ashwatthama To Know Before Watching Prabhas-Amitabh Bachchan's Film -
 Pakistan vs New Zealand 4th T20 Live Score, Latest Updates From Lahore: Toss at 7:00 PM PST
Pakistan vs New Zealand 4th T20 Live Score, Latest Updates From Lahore: Toss at 7:00 PM PST -
 Tech Mahindra Q4 Results: Cons PAT Declines 41% YoY To Rs 661 Crore; Exits FY24 In Red
Tech Mahindra Q4 Results: Cons PAT Declines 41% YoY To Rs 661 Crore; Exits FY24 In Red -
 Royal Enfield Unveils Revolutionary Rentals & Tours Service: Check Out All Details Here
Royal Enfield Unveils Revolutionary Rentals & Tours Service: Check Out All Details Here -
 Elon Musk’s X Is Launching a TV App Similar to YouTube for Watching Videos
Elon Musk’s X Is Launching a TV App Similar to YouTube for Watching Videos -
 AICTE introduces career portal for 3 million students, offering fully-sponsored trip to Silicon Valley
AICTE introduces career portal for 3 million students, offering fully-sponsored trip to Silicon Valley -
 Heeramandi Screening: Alia Bhatt, Ananya Panday, Rashmika Mandanna And Others Serve Finest Ethnic Style!
Heeramandi Screening: Alia Bhatt, Ananya Panday, Rashmika Mandanna And Others Serve Finest Ethnic Style! -
 Escape to Kalimpong, Gangtok, and Darjeeling with IRCTC's Tour Package; Check Itinerary
Escape to Kalimpong, Gangtok, and Darjeeling with IRCTC's Tour Package; Check Itinerary

Now, an underwater robot that swims via wireless controller

Washington, Oct 1 (ANI): An underwater robot can now swim its way wirelessly, all thanks to a waterproof controller designed and built by York University researchers.
AQUA, an amphibious, otter-like robot, is small and nimble, with flippers rather than propellers, designed for intricate data collection from shipwrecks and reefs.
The robot, a joint project of York, McGill and Dalhousie universities, can now be controlled wirelessly using a waterproof tablet built at York.
While underwater, divers can program the tablet to display tags onscreen, similar to barcodes read by smartphones.
The robot's on-board camera then scans these two-dimensional tags to receive and carry out commands.
"Having a robot tethered to a vehicle above water creates a scenario where communication between the diver, robot, and surface operator becomes quite complicated," said Michael Jenkin, co-author of the study.
"Investigating a shipwreck, for example, is a very delicate operation and the diver and robot need to be able to react quickly to changes in the environment. An error or a lag in communication could be dangerous," added Jenkin.
Realizing there was no device on the market that fit the bill, the research team set to work constructing a prototype.
The resulting device, fittingly dubbed AQUATablet, is watertight to a depth of 60 feet.
Aluminum housing with a clear acrylic cover protects the tablet computer, which can be controlled by a diver using toggle switches and on-screen prompts.
"A diver at 60 feet can actually teleoperate AQUA 30-40 feet deeper. Needless to say this is much easier on the diver, physically, and much safer," said Jenkin.
The tablet also allows divers to command the robot much as if they were using a video game joystick; turn the tablet right and AQUA turns right, too. In this mode, the robot is connected to the tablet by a slim length of optical cable, circumventing many of the issues of a robot-to-surface tether.
The optical cable also allows AQUA to provide video feedback from its camera to the operator.
In a totally wireless mode, the robot acknowledges prompts by flashing its on-board light.
Its cameras can be used to build 3-D models of the environment, which can then be used to guide the robot to particular tasks.
"This is a huge improvement on [a robot] having to travel to the surface to communicate with its operators," said Jenkin.
The study will be presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) in Taiwan. (ANI)


