
 Click it and Unblock the Notifications
Click it and Unblock the Notifications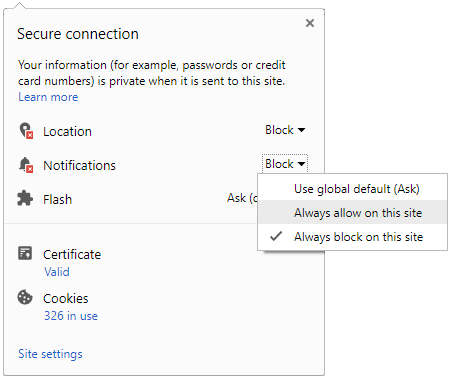
Novel robots to traverse potentially dangerous ice environments

Washington, May 28 : Researchers at the Georgia Institute of Technology, working with Pennsylvania State University, have created specially designed robots called SnoMotes to traverse potentially dangerous ice environments.
The SnoMotes work as a team, autonomously collaborating among themselves to cover all the necessary ground to gather assigned scientific measurements.
Data gathered by the Snomotes could give scientists a better understanding of the important dynamics that influence the stability of ice sheets.
According to Ayanna Howard, lead on the project and an associate professor in the School of Electrical and Computer Engineering at Georgia Tech, "In order to say with certainty how climate change affects the world's ice, scientists need accurate data points to validate their climate models."
"Our goal was to create rovers that could gather more accurate data to help scientists create better climate models. It's definitely science-driven robotics," she added.
The changing mass of Greenland and Antarctica represents the largest unknown in predictions of global sea-level rise over the coming decades.
"Given the substantial impact these structures can have on future sea levels, improved monitoring of the ice sheet mass balance is of vital concern," said Derrick Lampkin, an assistant professor in the Department of Geography at Penn State.
"We're developing a scale-adaptable, autonomous, mobile climate monitoring network capable of capturing a range of vital meteorological measurements that will be employed to augment the existing network and capture multi-scale processes under-sampled by current, stationary systems," he added.
The SnoMotes are autonomous robots and are not remote-controlled. They use cameras and sensors to navigate their environment.
Though current prototype models don't include a full range of sensors, the robots will eventually be equipped with all the sensors and instruments needed to take measurements specified by the scientist.
While Howard's team works on versatile robots with the mobility and Artificial Intelligence (A.I.) skills to complete missions, Lampkin's team will be creating a sensor package for later versions of Howard's rovers.
For glacial missions, scientists will select a location for investigation and decide on a safe "base camp" from which to release the SnoMotes.
The SnoMotes will then be programmed with their assigned coverage area and requested measurements. The researcher will monitor the SnoMotes progress and even reassign locations and data collection remotely from the camp as necessary.
The first phase of the project is focused primarily on testing the mobility and communications capabilities of the SnoMote rovers. Later versions of the rovers will include a more developed sensor package and larger rovers.
The team has created three working SnoMote models so far.
ANI


